Een nieuw normalisatievoorstel van de ISO TC299 (Robotica)-commissie, op nationaal niveau beheerd door Sirris en Agoria, is geëvalueerd en goedgekeurd. Het nieuwe project ISO/AWI PAS 5672 behelst een uitbreiding en verdere specificatie van de testmethodes voor het meten van krachten en druk in quasi-statische en kortstondige contacten tussen het bewegende deel van het collaboratieve robotapparaat en een mens, zoals beschreven in ISO/DIS 10218-2 Bijlage N.
Het Deense voorstel voor een nieuw werkonderdeel 'ISO/NP PAS 5672, Collaboratieve robotapparaten - Testmethodes voor het meten van krachten en druk in quasi-statische en kortstondige contacten met mensen’ - is goedgekeurd en in het werkprogramma van het technisch comité TC 299 opgenomen als een nieuw project (AWI). Het bevindt zich momenteel in een voorbereidende fase waarbij men een werkontwerp (WD) opstelt. De werkgroep 'ISO/TC 299/WG8 Validatiemethodes voor collaboratieve toepassingen' wordt opgericht. De eerste vergadering is gepland voor oktober 2021 en de publicatie van de nieuwe internationale norm voor april 2023.
Wat is nieuw in vergelijking met bestaande of in ontwikkeling zijnde normen?
De norm ISO/TS 15066 beschrijft grenswaarden en berekeningsmethodes maar geeft geen specifieke richtlijnen met betrekking tot de tests, terwijl bijlage N van de in ontwikkeling zijnde norm ISO/DIS 10218-2 dat wel doet.
Het nieuwe normalisatievoorstel ISO/NP PAS 5672 baseert zich op nieuwe onderzoeksresultaten voor het uitbreiden en verder specificeren van de testmethodes beschreven in 'ISO/DIS 10218-2 Bijlage N - Robottoepassingen met beperkt vermogen en beperkte kracht - Druk- en krachtmetingen'.
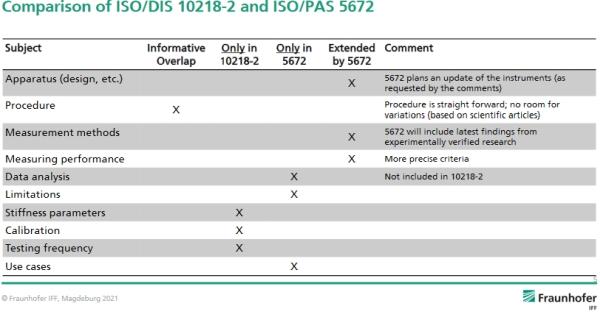
De in dit document beschreven procedures dienen om de juiste configuratie van deze maatregelen te controleren.
Dankzij de algemeenheid van de testmethodes is ISO/NP PAS 5672 van toepassing op robotmanipulators, mobiele platforms en actief bediende eindeffectoren voor industrieel gebruik.
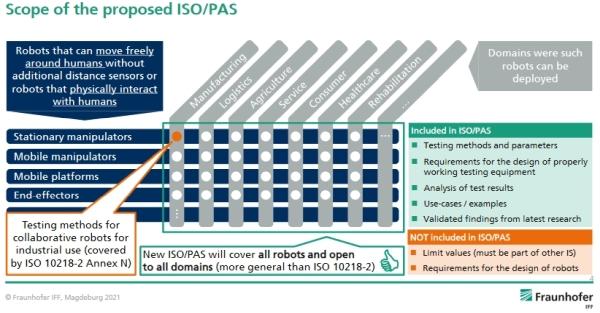
Het is belangrijk om te weten dat het niet de bedoeling is van ISO/PAS om de vereisten in bestaande of lopende projecten te kopiëren of ermee in strijd te zijn. Het doel van ISO/NP PAS 5672 is veeleer de toegang tot het meest recente onderzoek op dit gebied te verzekeren. Als PAS (Publicly Available Specification, specificatie beschikbaar voor het publiek) zal dit document een levensduur hebben van zes jaar, waarna het kan worden ingetrokken of omgezet of opgenomen in een internationale norm.
Wanneer moet men dit soort tests gebruiken?
Bij het werken met collaboratieve robots moeten menselijke operators soms in de nabijheid van het robotsysteem werken, terwijl stroom beschikbaar is voor de actuatoren van de robot. Afhankelijk van de robot en de gebruikte veiligheidssystemen kan er binnen een collaboratieve werkruimte fysiek contact plaatsvinden tussen een operator en het robotsysteem zonder dat de operator daarbij letsel oploopt.
De collaboratieve werkruimte is de gedeelde ruimte binnen het werkgebied waar het robotsysteem, inclusief het werkstuk, en een menselijke operator gezamenlijk taken kunnen uitvoeren tijdens de productie.
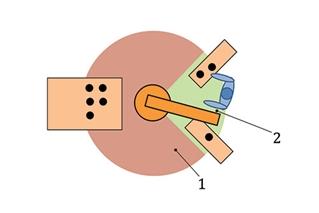
Schematische voorstelling van een mens-robot samenwerking, waarbij 1 het werkgebied voorstelt en 2 de gezamenlijke werkruimte.
(Bron: ISO/DIS 10218-2 - voorheen ISO/TS 15066)
Na de risicoanalyse van de robottoepassing in een eerste fase, moet men in een tweede fase een evaluatie maken van de vastgestelde risico’s.
Fase 1: risicoanalyse
De enige manier om de veiligheid te garanderen is aan de hand van een evaluatie van de volledige robotcel. Men moet rekening houden met de volledige robottoepassing, inclusief eindeffectors, het werkstuk, de in uitvoering zijnde processen en alle potentiële gevaren die ze kunnen opleveren. Een risicoanalyse is een must (EN ISO 12100) en elke cel moet worden getest (ISO/DIS 10218-2 - voorheen ISO/TS 15066).
Ontwikkelaars moeten dus een goed inzicht hebben in het werkingsgebied van het systeem, de bewegingskarakteristieken van de robot, de werkruimte en de workflow om de potentiële risicobronnen bij het gebruik van de robot te kunnen vaststellen. Deze bronnen omvatten elke mogelijke interactie tussen mens en robot - opzettelijk, onopzettelijk of als gevolg van defecte apparatuur - die kan leiden tot eender welk letsel.
Elk in de risicoanalyse genoemd contact moet worden geclassificeerd als kortstondig (botsing) of quasi-statisch (klemmen). Situaties waarbij de operator zich gemakkelijk van het contact met de robot kan verwijderen, bv. een robotonderdeel dat tegen de arm van de operator stoot, beschouwt men als kortstondig. Wanneer de operator klem komt te zitten tussen de robot en een vast object, bv. een robotgrijper die de hand van de operator tegen het tafelblad duwt, spreekt men van een quasi-statische situatie.
Fase 2: evalueren en testen
Eens vastgesteld, moet elk risico worden geëvalueerd. Bij deze evaluatie wordt elke interactie ingedeeld in de volgende categorieën: verwaarloosbaar, laag, medium, hoog of zeer hoog risico. Dit gebeurt aan de hand van drie belangrijke criteria:
- Ernst van het potentiële letsel
- Frequentie en/of duur van de blootstelling aan het risico
- Waarschijnlijkheid van het vermijden van het risico
Maar hoe moeten we de ernst van een potentieel letsel evalueren wanneer zich contacten voordoen tussen de operator en robotmanipulators, mobiele platforms en actief bediende eindeffectors? Dat is het doel van de testmethodes.
Mocht u nog vragen hebben, gelieve contact op te nemen met ons : veronique.dossogne@sirris.be of filiep.vincent@sirris.be.




