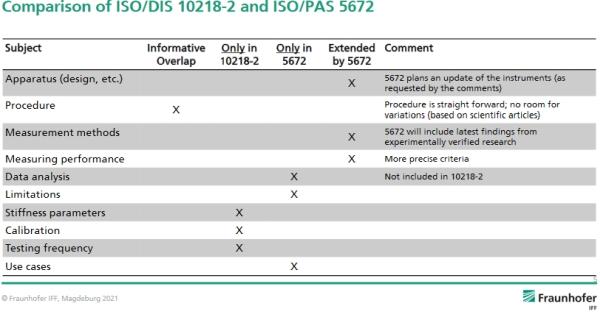
Une nouvelle proposition de normalisation de la commission ISO TC299 (Robotique), gérée par Sirris et Agoria au niveau national, a été évaluée et approuvée. Le nouveau projet ISO/AWI PAS 5672 étend et spécifie davantage les méthodes d'essai pour mesurer les forces et les pressions dans les contacts quasi-statiques et transitoires entre la partie mobile du dispositif robotique collaboratif et un être humain, définies dans l'ISO/DIS 10218-2 Annexe N.
La proposition du Danemark d'un nouvel élément de travail « ISO/NP PAS 5672, Dispositifs robotiques collaboratifs - Méthodes d'essai pour mesurer les forces et les pressions lors de contacts quasi-statiques et transitoires avec des humains » - a été approuvée et enregistrée dans le programme de travail du comité technique TC 299 en tant que nouveau projet (AWI). Il entre maintenant dans la phase préparatoire qui couvre la préparation d'un document de travail (WD). Le groupe de travail « Méthodes de validation ISO/TC 299/WG8 pour les applications collaboratives » est en cours de constitution. La première réunion du groupe est programmée en octobre 2021. La publication de la nouvelle norme internationale est prévue pour avril 2023.
Qu’y a-t-il de nouveau par rapport aux normes existantes ou aux normes en développement ?
La norme ISO/TS 15066 énonce des valeurs limites et des méthodes de calcul mais ne donne pas de directives spécifiques quant aux essais, alors que l'annexe N de la norme en cours d'élaboration ISO/DIS 10218-2 le fait.
La nouvelle proposition de normalisation ISO/NP PAS 5672 s'appuie sur de nouveaux résultats de recherche visant à étendre et préciser davantage les méthodes d'essai définies dans l'« ISO/DIS 10218-2 Annexe N - Applications robotiques à puissance et force limitées - Mesures de pression et de force ».
Les procédures décrites dans ce document permettent de vérifier la bonne configuration de ces mesures.
Grâce à la généralité des méthodes d'essai, l'ISO/NP PAS 5672 s'applique aux robots manipulateurs, aux plates-formes mobiles et aux organes terminaux effecteurs à actionnement actif, à usage industriel.
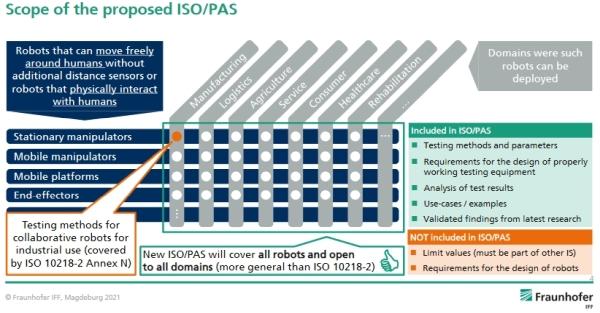
Il convient de souligner qu'il n'est pas dans l'intention de l'ISO/PAS de dupliquer ni d'entrer en conflit avec les exigences trouvées dans des projets existants ou en cours. L'objectif de l'ISO/NP PAS 5672 est plutôt d'assurer l'accès à la recherche de pointe dans le domaine. En tant que spécification publiquement disponible (PAS), ce document aura une durée de vie maximale de six ans, après quoi il pourra être transformé en, ou inclus dans, une norme internationale, voire supprimé.
Quand utiliser ce type d’essai ?
Dans les opérations de robotique collaborative, des opérateurs humains peuvent travailler à proximité du système de robot, tandis que l'alimentation est disponible pour les actionneurs du robot. En fonction du robot et des systèmes de sécurité utilisés, un contact physique entre un opérateur et le système de robot peut se produire dans un espace de travail collaboratif sans blesser l'opérateur.
L'espace de travail collaboratif est l'espace partagé au sein de la zone d'exploitation où le système robotique, y compris la pièce à usiner, et un opérateur humain peuvent effectuer des tâches simultanément pendant la production.
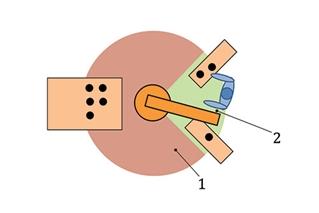
Schéma d'une opération collaborative homme-robot, où 1 représente l'espace d'exploitation et 2 l'espace de travail collaboratif.(Source : ISO/DIS 10218-2 - précédemment ISO/TS 15066)
Après l'évaluation, dans une première étape, des risques de l'application de robotique, les risques identifiés doivent encore être évalués dans une seconde étape.
Étape 1 : Évaluation des risques
Le seul moyen d'assurer la sécurité est d'évaluer l'ensemble de la cellule robotisée. Il y a lieu de prendre en compte la totalité de l'application de robotique, y compris l'outillage en bout de bras, la pièce à usiner et les processus en cours d'exécution, ainsi que les risques qu'ils pourraient présenter. Une évaluation des risques est indispensable (EN ISO 12100) et des essais doivent être effectués sur chaque cellule (ISO/DIS 10218-2 - auparavant ISO/TS 15066).
Ainsi, les développeurs doivent bien comprendre la portée des opérations du système, les caractéristiques de mouvement du robot, l'espace de travail et le flux de travail afin d'identifier les sources de risques dans le fonctionnement du robot. Ces sources incluent toute interaction robot-humain possible, intentionnelle, accidentelle ou résultant d'une défaillance de l'équipement, qui pourrait entraîner une blessure quelconque.
Chaque situation de contact notée dans l'évaluation des risques doit être classée selon l'un des types suivants : transitoire (collision) ou quasi-statique (serrage). Les situations dans lesquelles l'être humain peut facilement s'éloigner du contact avec le robot, telles qu'une partie du robot heurtant le bras de l'opérateur, sont considérées comme transitoires. Lorsque l'humain est coincé entre le robot et un objet fixe, tel qu'une pince robotique pressant la main de l'opérateur contre la table, le contact est considéré comme quasi-statique.
Étape 2 : Évaluation et essai
Une fois les risques identifiés, chacun d’entre eux doit être évalué. Cette évaluation classe chacune de ces interactions en risque négligeable, faible, moyen, élevé ou très élevé, en utilisant trois critères clés :
- Gravité des blessures potentielles
- Fréquence et/ou durée d'exposition au risque
- Probabilité d'éviter le risque
Mais comment doit-on évaluer la gravité des blessures potentielles lorsque des contacts entre manipulateurs humains et robots, plates-formes mobiles et organes terminaux effecteurs à actionnement actif, se produisent ? C'est le but des méthodes d'essai.
Si vous avez d’autres questions, veuillez nous contacter aux adresses courriel suivantes : veronique.dossogne@sirris.be ou filiep.vincent@sirris.be.




