A new standardisation proposal from the ISO TC299 (Robotics) commission managed by Sirris and Agoria on a national level has been evaluated and approved. The new project ISO/AWI PAS 5672 expands and further specifies the test methods for measuring forces and pressures in quasi-static and transient contacts between the moving part of the collaborative robotic device and a human set out in ISO/DIS 10218-2 Annex N.
Denmark's proposal for a new work item 'ISO/NP PAS 5672, Collaborative robotic devices - Test methods for measuring forces and pressures in quasi-static and transient contacts with humans' - has been approved and has been registered in the programme of work of the technical committee TC 299 as a new project (AWI). It enters now in the preparatory stage that covers the preparation of a working draft (WD). The working group 'ISO/TC 299/WG8 Validation methods for collaborative applications' is being set up. The first meeting is scheduled for October 2021. The publication of the new international standard is planned for April 2023.
What is new in comparison with existing norms or norms in development?
The standard ISO/TS 15066 sets out limit values and calculation methods but does not specifically give guidance on testing, whereas Annex N of the standard under development ISO/DIS 10218-2 does so.
The new standardisation proposal ISO/NP PAS 5672 draws upon new research findings to expand and further specify the test methods set out in 'ISO/DIS 10218-2 Annex N - Power and force limited robot applications - Pressure and force measurements'.
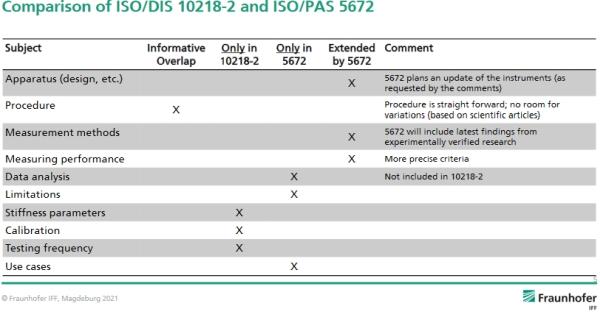
The procedures described in this document serve to verify the proper configuration of these measures.
Thanks to the generality of the test methods, ISO/NP PAS 5672 applies to robot manipulators, mobile platforms, and actively actuated end effectors for industrial use.
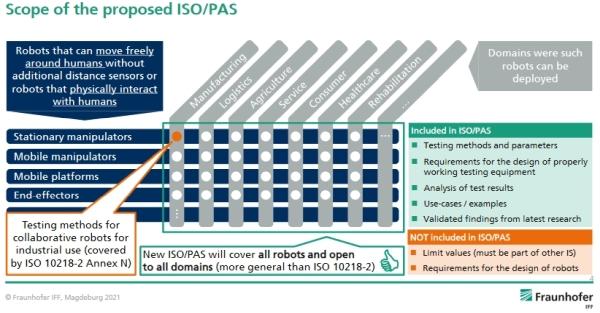
It should be stressed that it is not the intention of the ISO/PAS to duplicate or conflict with the requirements found in any existing or on-going projects. The aim of ISO/NP PAS 5672 is rather to ensure access to state-of-the-art research in the field. As a Publicly Available Specification (PAS), this document will have a maximum life of six years, after which it can be transformed into or included in an international standard or withdrawn.
When should this kind of test be used?
In collaborative robot operations, human operators can work in close proximity to the robot system, while power is available to the robot’s actuators. Depending on the particular robot and safety systems employed, physical contact between an operator and the robot system might occur within a collaborative workspace without causing injury to the operator.
The collaborative workspace is the shared space within the operating area where the robot system, including the workpiece, and a human operator can perform tasks concurrently during production.
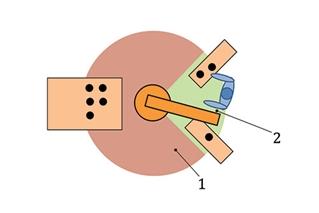
Diagram of a human-robot collaborative operation, where 1 represents the operating space and 2 the collaborative workspace. (Source : ISO/DIS 10218-2 - previously ISO/TS 15066)
After the risk assessment of the robot application in a first step, the identified risks must be evaluated in a second step.
Step 1 : risk assessment
The only way to ensure safety is through an evaluation of the entire robot cell. You have to consider the entire robotic application, including the end-of-arm tooling, workpiece, and processes being performed, and any potential hazards they could present. A risk assessment is a must (EN ISO 12100) and testing should be done on every cell (ISO/DIS 10218-2 - previously ISO/TS 15066).
Thus, developers must fully understand the system's scope of operations, the robot's movement characteristics, the workspace and workflow in order to identify the potential risk sources in robot operation. These sources include any possible robot-human interaction - whether intended, inadvertent, or resulting from equipment failure - that might result in an injury of some kind.
Each contact situation noted within the risk assessment needs to be classified as one of the following types below: transient (collision) and quasi-static (clamping). Situations in which the human can readily move away from contact with the robot, such as a robot part bumping against the operator’s arm, are considered transient. When the human is trapped between the robot and a fixed object, such as a robotic gripper pressing the operator's hand against the tabletop, the contact is considered quasi-static.
Step 2 : evaluate and test
Once the risks are identified, each must be evaluated. This evaluation categorises each such interaction as a negligible, low, medium, high, or very high risk using three key criteria:
- Severity of potential injury
- Frequency and/or duration of exposure to the hazard
- Probability of avoiding the hazard
But how should we evaluate the severity of potential injury as contacts between the human and robot manipulators, mobile platforms, and actively actuated end effectors occur? That is the purpose of the test methods.
If you have any further questions, please contact us: veronique.dossogne@sirris.be or filiep.vincent@sirris.be.




