
Fitting custom interior doors on large construction sites is far from easy. To get the job done as correctly and efficiently as possible, Kulapro examined the options for an augmented reality-based indoor navigation system for its installers.
Kulapro is located in Wavre, Belgium, makes a range of products, including interior doors and custom furniture. The company manufactures and delivers, among other things, doors for larger projects. Each door is unique and can only be installed in one place.
When the Kulapro installers arrive at a construction site, it’s not immediately clear where to place each door and how to get them there. There may be no lifts yet or some stairwells are still under construction. Passages and obstacles also change from day to day. That’s why it was useful to look into the possibility of providing installers with an indoor navigation app on their smartphone or tablet to show them how to get to the place where the door should be installed. Naturally, the technology used by the installers must be robust, user-friendly and quick and easy to learn. Nor should it cost them any extra work or effort, although they will naturally need to follow a short training course to get started with it.
Problem setting
A construction site can be very large (think of hospitals or schools), there can be several floors and there can soon be dozens or even hundreds of doorways and entrances as well as unfinished or blocked passageways and stairwells or elevator shafts that may or may not be accessible. This doesn’t make it easy to find where a door needs to go. What’s more, each door is unique and can only be installed in one place, leaving no room for error.
The approach to the problem focused on three smaller problems:
- Where does a door need to go in the building? Every door naturally has its own specific properties, such as access control, fire resistance and dimensions.
- What is the shortest route to get this door to the right place?
- How do I need to adjust the route to take account of obstacles and the current construction activities?
Tools that make it easy to find the right place with certainty and precision were therefore certainly welcome.
Basic technologies for indoor navigation
Overview
Navigation requires three technologies that must be tightly integrated:
- An up-to-date map
- A system that can find where you are so it can locate this on a map of the building.
- An algorithm that can calculate the shortest route and display it clearly to a user.
Making a map
This can be done with a mobile device that uses both LiDAR and photos to create a detailed point cloud of the entire building. This can be used to make a 2D or 3D representation of the building.
Finding your position
We are all familiar with the use of GPS signals when outdoors, but unfortunately it doesn't work indoors. Indoor positioning in finished buildings can be made possible by adding, for example, additional beacons such as BLE or QR codes. Wi-Fi and other radio signals and triangulation techniques are also sometimes used for this, but none of this is available in a building still under construction.
This means that the only way to find your position in a construction setting is by recognising geometric shapes based on distance measurements derived from, for example, LiDAR, by recognising photographs of the surroundings or by a combination of the two. This needs to take into account the movement of the measuring device (‘odometry’), which might be a smartphone.
Navigation
This requires an app that the installer takes with them and which can focus on the surrounding walls to work out where it is. After that, the destination is selected and the app will show the optimum route.
This will naturally require a back-end application in which the various door positions (POIs) must be entered in advance (possibly extracted automatically from the BIM data of the building).
Obstacles that could get in the way must also be updated in the system every day so it can calculate and propose a currently usable route.
The challenge
After identifying the problem and the technologies needed for this project, we started looking for a partner that could help us. The Ghent-based surveying company MEET HET turned out to have all the necessary technology. All parties were aware from the outset that the changeability of a site environment would undoubtedly be the greatest challenge.
Proof of concept
To test the concept, a suitable building site was needed. The Theodoortje - a new daycare centre in Jette - was chosen for this. This three-storey building has about 80 doors. The client, VUB, found the case study and the proof of concept interesting enough to grant us access and the necessary cooperation.

The first step was to scan the entire building with a mobile scanner.

The mobile scanner from Navvis was used for this (see photo above). The operator walked it through all the rooms and corridors. The device measured the distances from the sensor to all the walls and obstacles while taking a continuous stream of photos with various cameras. This data could then be used to construct a complete point cloud of the building.
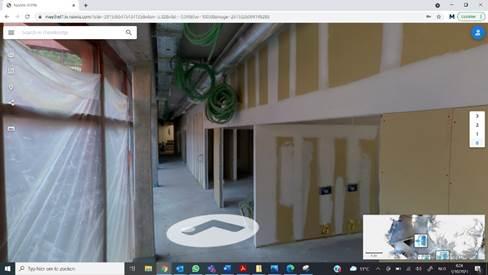
About a week after the scanning, the digital version was hosted online on the Navvis platform. This made it possible, for example, to take a virtual walk through the building.
The next step was to give all the doors a unique code. Kulapro already had a digital map showing all the unique door codes and the coordinates of where the doors had to go. The codes and coordinates were processed with a script and read into the Navvis software. A unique door number and code could now be seen at each doorway.

The next step was for the installers to enter the door code into the system once they were at the building site so they could be guided to where the door had to go. This was tested with both an Android tablet and a smartphone. Before the app could start providing effective indoor navigation, it had to know where it was in the building. This requires an initialisation procedure. This procedure involves briefly pointing the tablet or smartphone at a wall and then turning round until the system can recognise the room.
Once the app knows where it is in the building and the installer has chosen a door code, the app starts calculating a route and displays the set route. This gets the installer to the right place with the right door and the installation can begin.
The app (ViewAR) that provides the route guidance (a red line) also uses augmented reality: the route is shown on top of the real image of the building as seen by the camera of the tablet or smartphone.

The greatest challenge here was recognising the app's starting position. After the scanning, it took several weeks and many changes to achieve realisable and accurate positioning. After searching for a room that had not changed too much, the present position could still be recognised and the indoor navigation started and successfully completed. For the next door you could start from the last known position: a new navigation command could be started from anywhere in the building as long as the app recognised the room.
Conclusion
We can regard the proof of concept as successful. It was possible to get to the right destination from a starting point. However, the time between the scanning and installing the doors proved crucial. This especially affected the ability of the app to find its starting point in the building.
Possible further steps
The procedure is open to further optimisation. This is made possible by collaboration with the contractor involved (via BIM) and the parts suppliers (typically subcontractors).
Another possible next step is the automation of the process steps: door numbers can be taken from the BIM model and automatically placed as POIs in the scanned model. The life cycle phase from the BIM model can be linked to the scanned model. This then indicates, for example, whether certain stairs or passages have been completed or not. Another option is to feed installation information back to the BIM model.
Furthermore, the cost allocation can be optimised.
In the future, various subcontractors, including installers of windows, sanitary facilities and heating installations, could use the AR-based indoor navigation, allowing the investment cost to be shared between them.
Ideally, the option would be offered by the client themselves, resulting in fewer positioning errors because there is less need to search for the correct places ('first time right').
This case study formed part of the Proeftuin ConstructionSite Vision, in collaboration with Howest and the BBRI. Thanks also to Houben and the VUB for their cooperation.
|




