
ILIAS Solutions provides a technological platform for organisations that manage a large fleet of mobile and complex vehicles deployed worldwide. The most important component of this platform, I-UMS, is a smart device that can be mounted on a wide variety of vehicles. This device continuously monitors the use of the vehicles via various sensors (for example, accelerometer, gyroscope, etc.) and the vehicle’s CANbus interface, and can integrate the data generated by the vehicle itself. It can send the collected data to a server once the vehicle comes close to a specific communications antenna.
ILIAS Solutions wants to be able to detect whether the vehicle is overloaded, based on the data collected by the device. Overloading can not only cause damage to the road, but also significantly affects the condition of the vehicle itself. For example, it can result in overheated tyres, which wear more quickly, or in cracks in the chassis. In addition, it can invalidate the vehicle's warranty, as driving an overloaded vehicle can easily be avoided.
ILIAS Solutions teamed up with the experts from Sirris and EluciDATA Lab to devise a way to identify overloading as quickly as possible, using advanced AI techniques to warn drivers and recommend remedial action. This includes two aspects: identifying characteristics that are typically associated with overloading, and experimenting with a suitable algorithm that, based on those characteristics, can correctly identify whether a vehicle is overloaded.
Typical characteristics of overloading
The data for this task was collected as part of the STUNT project and was financially supported by Innoviris. The data cover different routes taken by different vehicles of the same type, carried out by different drivers, on different types of terrain (e.g. asphalt and off-road). The vehicle was either normally loaded, slightly overloaded, moderately overloaded or significantly overloaded.
Structured analysis of these data showed that dynamic driving characteristics of the vehicle are typical when overloaded. Fifteen driving characteristics were identified, including the average and standard deviation of the engine speed, engine load, accelerator position, absolute pressure of the intake manifold, variation on the X, Y and Z axes, etc. Each of these characteristics were dynamically calculated every second and were aggregated per 10-second block. This provided a detailed image of how the characteristics evolve dynamically over time. These dynamic characteristics were then used in a machine learning algorithm, to provide an estimate of the overload status of the vehicle.
Experimenting with different algorithms
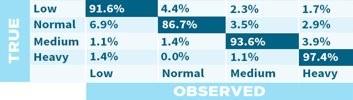
Several supervised classification algorithms were employed, such as the k-nearest-neighbors algorithm, naive Bayes classifier, random forest and support vector machines. Subsequently, their performance was mutually evaluated. These experiments showed that random forest achieved the best accuracy with the highest level of consistency: in about 90% of the cases, the algorithm succeeded in recognising the correct degree of overloading, as shown in the table below.
Furthermore, an experiment was also conducted with an alternative approach based on deep learning. An LSTM (long short-term memory) network capable of dealing with temporal dependencies was trained on the raw data and its performance was then evaluated. The resulting model is capable of recognising the correct degree of overloading in about 70% of cases. In this case, the deep-learning approach – which is very popular at present – performs less well than a more traditional approach in which domain knowledge is integrated.



