
Installer des portes intérieures sur mesure sur un gros chantier n’est pas une chose facile. Pour aider ses installateurs à le faire le plus efficacement et correctement possible, Kulapro a évalué le potentiel d’un système de navigation indoor en réalité augmentée.
Kulapro fabrique notamment des portes intérieures et du mobilier sur mesure. L’entreprise wavrienne fournit par ex. des portes pour des très grands projets. Chaque porte est unique et doit être installée à un endroit précis.
Lorsque les installateurs de Kulapro arrivent sur un chantier, il leur arrive de perdre beaucoup de temps à déterminer l’endroit où chaque porte doit être posée ainsi que le chemin le plus court pour arriver à cet endroit. Parfois, les ascenseurs ne sont pas encore fonctionnels et certaines cages d’escaliers pas encore praticables. De plus, les éventuels passages et obstacles changent tous les jours en fonction de l’avancement du chantier. Pour ces raisons, l’entreprise étudie la possibilité d’équiper ses installateurs d’une application de navigation indoor sur leur smartphone ou tablette pour les aider à atteindre l’endroit où chaque porte doit être posée. Naturellement, un tel système se doit d’être robuste, facile à apprendre et simple à utiliser. Il ne doit pas demander de travail ou d’effort supplémentaire, hormis bien sûr une courte formation pour apprendre à s’en servir.
Problématique
Certains sites de construction de plusieurs étages ont une taille considérable et le nombre de portes à installer peut vite atteindre quelques dizaines à centaines de portes (pensez par ex. à un hôpital ou une école). Il peut y avoir plusieurs entrées, des passages inachevés ou obstrués, et différents puits d’ascenseurs ou cages d’escalier accessibles ou pas. Il s’ensuit que les installateurs perdent souvent du temps à rechercher l’endroit où une porte doit être posée. De plus, chaque porte est unique et doit par conséquent être placée à un endroit précis, ce qui ne laisse pas de place à l’erreur.
Pour apporter une solution, il est nécessaire de répondre à trois questions :
- Comment trouver facilement l’endroit où chaque porte doit être posée ? Chaque porte a en effet des caractéristiques spécifiques, comme le contrôle d’accès, la résistance au feu, les dimensions, …
- Quel est le chemin le plus court pour transporter chaque porte au bon endroit ?
- Comment tenir compte des obstacles et de l’état d’avancement des travaux pour modifier l’itinéraire en conséquence ?
Il fallait donc trouver des outils permettant de déterminer facilement le bon endroit et de minimiser le risque d’erreur.
Technologies de base pour la navigation à l’intérieur des bâtiments
Aperçu
Un système de navigation requiert trois technologies parfaitement interopérables :
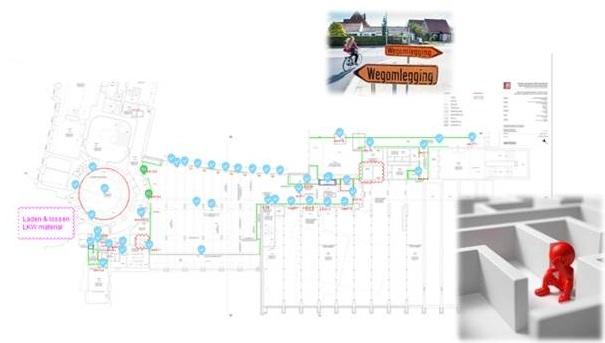
- un plan du bâtiment à jour
- un système de géolocalisation à l’intérieur du bâtiment (indoor) permettant de montrer la position de l’utilisateur sur le plan du bâtiment
- un algorithme qui calcule le chemin le plus court et indique clairement à l’utilisateur le chemin à suivre
Elaboration du plan du bâtiment
Le plan peut être réalisé à l’aide d’un appareil mobile utilisant à la fois la télédétection LiDAR et des photos pour élaborer un nuage de points détaillé de l’ensemble du bâtiment. Ce nuage de points est utilisé pour construire une représentation 2D ou 3D du bâtiment.
Géolocalisation
Nous connaissons tous l’utilisation du signal GPS en extérieur, mais malheureusement cela ne fonctionne pas en intérieur. A l’intérieur d’un bâtiment terminé et réceptionné, il est possible de se géolocaliser en ajoutant des balises, par ex. des codes BLE ou QR, ou en utilisant des techniques de triangulation couplées à des signaux Wi-Fi ou radio. Ces techniques ne sont cependant pas applicables dans un bâtiment en construction.
Dans un environnement de chantier, la seule technique de géolocalisation possible est la reconnaissance des formes géométriques, basée sur des mesures de distance (avec par ex. un LiDAR), sur la reconnaissance de photos de l’environnement, ou sur une combinaison des deux. Le déplacement de l’appareil de mesure (par ex. un smartphone) est également pris en compte (« odométrie »).
Navigation
Pour naviguer, l’installateur commence par se positionner avec une application qui reconnaît l’endroit où il se trouve lorsqu’il pointe son appareil autour de lui. Ensuite, il choisit une destination finale et l’application calcule l’itinéraire le plus court.
Naturellement, il devra aussi avoir à disposition une application de référence, dans laquelle il aura indiqué à l’avance les positions des différentes portes à installer (POI, ou Point Of Interest, importés automatiquement ou pas des données BIM du bâtiment).
De plus, les obstacles susceptibles de bloquer le passage devront être mis à jour quotidiennement dans le système pour pouvoir calculer et proposer un itinéraire adéquat.
Le défi principal
Après avoir identifié la problématique et les technologies nécessaires pour y apporter une solution, nous avons recherché un partenaire pour nous assister. L’arpenteur-géomètre MEET HET de la région gantoise semblait disposer de toutes les technologies nécessaires. Toutes les parties savaient dès le départ que le principal défi serait certainement l’évolution constante du site liée à l’avancement des travaux.
Proof of concept
L’évaluation du concept nécessitait un chantier adapté. Nous avons opté pour Theodoortje, une nouvelle crèche à Jette, qui compte trois étages et près de 80 portes. Le maître d’ouvrage, la VUB, a jugé que le projet et la preuve du concept étaient suffisamment intéressants pour nous accorder l’accès et la collaboration nécessaires.

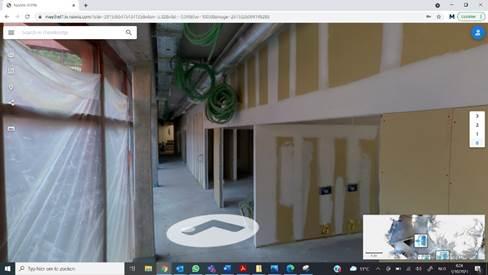
La première étape du projet consistait à scanner l’ensemble du bâtiment avec un scanner portable.

Pour cette tâche, l’opérateur a parcouru chaque corridor et chaque pièce du bâtiment avec le scanner mobile de NavVis (voir photo ci-dessus). L’appareil a mesuré les distances entre le capteur et tous les murs et obstacles et, en même temps, enregistré un flux continu de photos à l’aide de plusieurs appareils. Ces données ont permis ensuite de construire un nuage de points complet du bâtiment.
Environ une semaine après le scannage du bâtiment, la version numérique était en ligne, hébergée sur la plateforme de NavVis. Elle permettait entre autres de se déplacer virtuellement dans tout le bâtiment.
L’étape suivante consistait à attribuer un code unique à chaque porte. Kulapro disposait déjà d’un plan numérique sur lequel étaient indiqués les codes uniques de toutes les portes ainsi que les coordonnées de leurs emplacements. Ces codes et coordonnées ont été importés et traités dans le logiciel de NavVis à l’aide d’un script. Un numéro et un code uniques étaient maintenant visibles à côté de chaque ouverture de porte.

A l’étape suivante, après avoir saisi un code de porte dans le système, les installateurs présents sur le chantier se sont laissés guider vers l’endroit où chaque porte devait être placée. Cette étape a été réalisée avec une tablette et un smartphone Android. Avant de pouvoir effectivement démarrer la navigation indoor, l’application devait d’abord déterminer la position exacte de l’utilisateur dans le bâtiment, via une procédure d’initialisation. Pour cela, l’installateur pointe la tablette ou le smartphone vers un mur et tourne ensuite sur lui-même jusqu’à ce que le système reconnaisse l’endroit où il se trouve.
Une fois que l’appli sait à quel endroit du bâtiment elle se trouve et que l’installateur a choisi un code de porte, elle calcule un itinéraire et donne les instructions pour suivre le chemin tracé. L’installateur arrive ainsi au bon endroit avec la bonne porte et peut commencer la pose.
L’application ViewAR qui guide l’installateur utilise aussi la réalité augmentée pour montrer le chemin à suivre (avec une ligne rouge) en surimpression sur l’image du bâtiment vue par la tablette ou la caméra du smartphone.

Le plus grand défi ici était de reconnaître la position initiale de l’installateur, vu que plusieurs semaines s’étaient écoulées entre le scannage et la pose effective, et par conséquent des changements étaient survenus sur le site. Il était donc nécessaire de rechercher un endroit qui n’avait pas trop changé pour que l’appli puisse le reconnaître et démarrer la navigation. Pour passer à la pose d’une porte suivante, l’appli peut partir de la dernière position connue. Bref, il était possible de démarrer une nouvelle navigation à n'importe quel endroit du bâtiment tant que l’appli reconnaisse cet endroit.
Conclusion
La preuve du concept peut être considérée comme réussie. Il a été possible d’être guidé depuis un point de départ jusqu’à la bonne destination. Cependant, le temps écoulé entre le scannage du bâtiment et la pose effective des portes s’est avéré un facteur crucial, surtout pour la reconnaissance initiale du point de départ par l’application.
Eventuelles étapes suivantes
La procédure est susceptible d’être encore optimisée, notamment en coopérant avec l’entrepreneur en charge (via BIM) et les autres fournisseurs d’éléments et équipements (entreprises de sous-traitance typiques).
Une autre éventuelle amélioration serait d’automatiser les étapes du processus. Ainsi, les numéros des portes pourraient être extraits du modèle BIM et ajoutés automatiquement comme POI (Point Of Interest) dans le modèle scanné. De plus, les phases du cycle de vie du modèle BIM peuvent être couplées au modèle scanné afin, par ex., d’indiquer si certains escaliers ou passages ont déjà été réalisés ou pas. Une autre option serait l’intégration automatique dans le modèle BIM des informations de pose des portes et autres éléments.
Par ailleurs, la répartition des coûts pourrait aussi être optimisée. En effet, d’autres sous-traitants pourraient à l’avenir être intéressés par la navigation indoor en réalité augmentée, comme par ex. les installateurs de fenêtres, d’équipements sanitaires, de chauffage, … L’investissement pourrait alors être réparti entre les différents sous-traitants.
Idéalement, c’est le maître d’ouvrage qui devrait lui-même proposer un système de navigation indoor afin de réduire le temps passé à rechercher les emplacements corrects et minimiser les erreurs de placement (principe « First Time Right »).
Cette étude a été réalisée dans le cadre du Proeftuin ConstructionSite Vision, en collaboration avec Howest et le CSTC. Nous remercions également Houben et la VUB pour leur participation.
|




